
GUIDE: Common problems with encoders and troubleshooting tips
Encoders are integral components in many motion control systems, providing critical feedback to motors for position, speed, and direction control. However, like any mechanical or electrical device, encoders can sometimes encounter problems that disrupt system performance. Identifying and resolving these issues quickly is essential to maintaining the reliability and efficiency of your system.
In this article, we’ll explore some of the most common problems with encoders and offer troubleshooting tips to help you diagnose and fix them. Read more


Choosing the Right Encoder for Motors: Key Considerations
When selecting an encoder for a motor system, several factors across electrical, mechanical, and software aspects need to be carefully evaluated. Encoders play a vital role in measuring the position, speed, and direction of the motor shaft, providing essential feedback for motor controllers in a variety of applications. A poorly chosen encoder can lead to poor system performance, increased wear and tear, or even system failure. This article provides a comprehensive guide to understanding the key factors to consider when selecting an encoder for motors. Read more
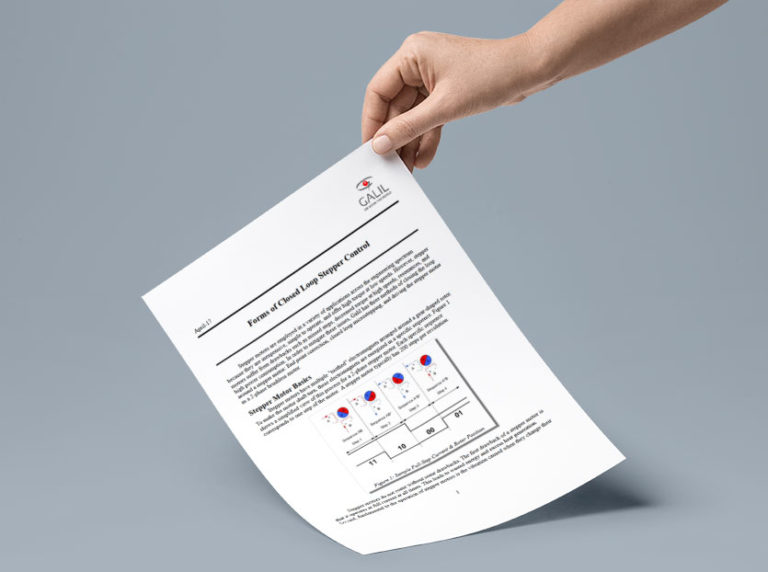
White Paper: Forms of closed loop stepper control.
Stepper motors are employed in a variety of applications across the engineering spectrum because they are inexpensive, simple to operate, and offer high torque at low speeds. However, stepper motors suffer from drawbacks such as missed steps, decreased torque at high speeds, resonances, and high power consumption. In order to mitigate these issues, Galil has three methods of closing the loop around a stepper motor: End point correction, closed loop microstepping, and driving the stepper motor as a 2-phase brushless motor.
What is a Halbach Array and what is it used for?
There are significantly exciting areas where you can take advantage of Halbach Array. The amplified magnetic field on one side while closer to zero on the opposite side are attractive magnetic properties. And the rotating magnetic field of the Halbach Array provides both higher energy density and efficiency while reducing eddy current losses. These properties are particularly desirable in the manufacture of brushless motors in smaller sizes.
In this video we explain what a Halbach array is, what it’s used for, which advantages and disadvantages it might bring.
Do you think you could benefit from the Halbach Array in your industrial application? Contact us directly!


Video guide: New features in script language for motion controllers from FAULHABER
FAULHABER’S motion controller provides a simple solution to quickly let you realise your dynamic design ideas
This is particularly important in today’s world as the demands for decentralized electronics and capacity to handle complex real-time applications become ever higher.
Of course, both motor and motion controller can do significantly more than is shown here. For a more comprehensive instruction of how to program in BASIC for automation purposes, use the whitepaper from FAULHABER concerning its local scripting capabilities (pdf).
Interested in downloading the ‘Motion Manager’ software and try out the motion controller while connected to a motor? We guide you all the way in below videotutorial.
Want to know more? Ask us and we’ll be happy to help!

Scientist explains motor technology
The technology behind RoboDrive was originally designed for use in the space and for a number of years it has been used in a robot outside the ISS space station. In this video Manfred Schedl explains how the engine technology works as he originated and performed during his time at the German Aerospace Center (DLR).
RoboDrive multi-pole high torque motors for maximum torque and high precision – at the lowest possible weight and power loss. The motors are ideal for industries such as medical, aerospace, robotics and automation.
The application examples can provide guidance on how to benefit from RoboDrive. But there are of course more applications, or what do you think?
Contact me if you want to know more!

Directionality of microphones
The pick-up efficiency of a microphone may vary depending on the direction from which the sound comes. This characteristic can be an unavoidable consequence of the design of the microphone or a conscious design to obtain properties for specific purposes. Some microphones also have variable characteristics. This is usually illustrated graphically in diagrams showing the characteristics. In this case the microphone is located in the centre with its front directed upwards in the diagram.


Modern magnets and corrosion
Neodymium magnets, or rather NdFeB, are products produced by powder metallurgy and based on neodymium, iron and boron, which makes magnets that are impressive in relation to their strong magnetic field. They are actually the strongest permanent magnets that can be produced today.
What is not as well known is that neodymium magnets are susceptible to corrosion in their raw state. When the magnets are exposed to humidity they can corrode, which can destroy the magnet if the magnets are not treated correctly from the outset. The magnets can be surface treated to prevent corrosion.

Five technologies for obtaining linear motion with electric motors
Many applications for electric motors involve the conversion of a rotary motion to a linear motion, e.g. in actuators, XY tables, zoom or focus in optical applications etc.
This can be done in many different ways, with different advantages and disadvantages, which are suitable for different applications. In this article we look at some of the common methods of producing linear motion with electric motors.